
控制算法 · 机械工程 · 物理应用
一种斜面上能保持平衡的手推车
王同学 · 零一优创学员
2
项省级大奖
低通滤波
核心算法
雏鹰杯
小院士
上海市雏鹰杯小院士上海市青创赛二等奖
王同学 · 零一优创学员
王同学的外公在菜市场旁边经营一家小仓库,每天都要推着满载的手推车上下货运坡道。有一次,车子在陡坡上因为重心失控向一侧倾倒,货物散落一地,外公也差点跌倒。这件事让王同学开始关注一个被大多数人忽视的问题:为什么手推车到了斜面上就会变得如此危险?
他查阅了相关事故统计,发现手推车侧翻和货物滑落在物流和零售业从业人员中是高频职业伤害之一,却极少有针对性的技术解决方案。大多数人的应对方式是「用力扶稳」——这既费体力,又难以真正保证安全。
王同学决定用数学和物理的方式去解构这个问题。他建立了手推车在斜面上的受力模型,分析了货物重心、坡度角和推杆扭力三者之间的关系,从理论层面找到了「失控临界点」,再从这个临界点出发,设计出主动平衡方案。
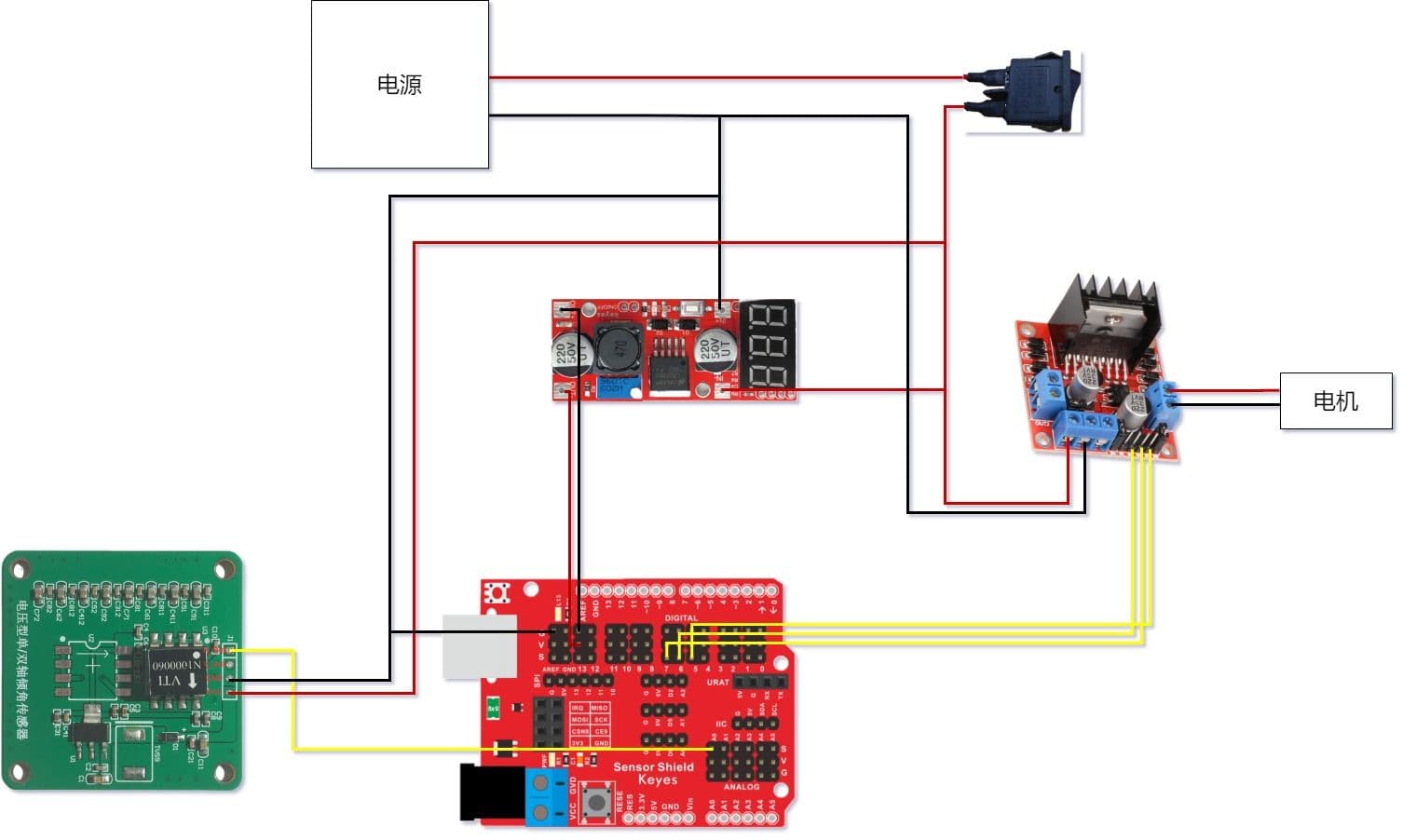
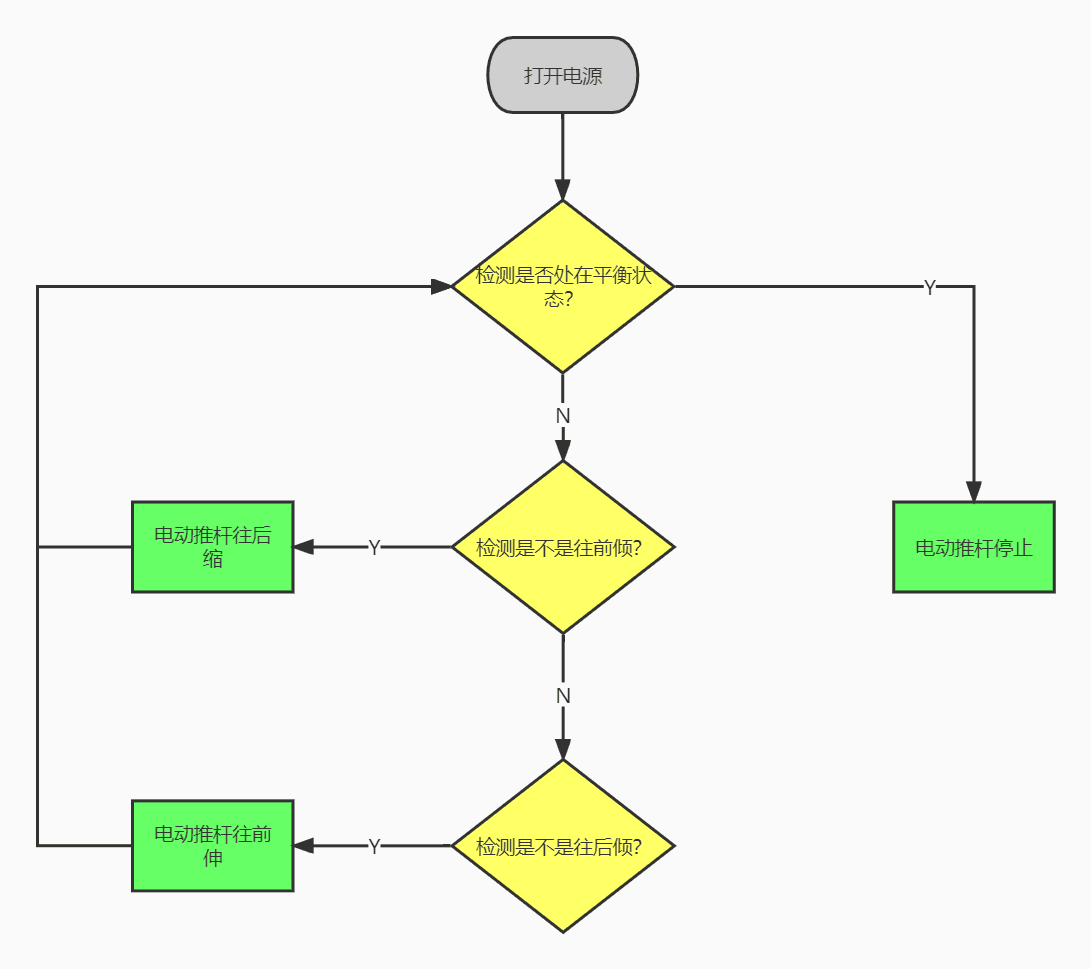
利用低通滤波算法,合理分配斜面坡度与推杆扭力的关系,让货物在斜面上迅速调整平衡
— 项目亮点
陀螺仪在运动状态下读数会混入大量高频噪声,直接用于控制会让执行机构不断抖动,反而加剧不稳定。王同学引入低通滤波算法对陀螺仪数据进行预处理,通过调整截止频率,在保留真实坡角信息的同时有效抑制了噪声,让控制系统能够基于干净、平滑的信号做出合理响应。
理论建模得出的最优扭力分配值和实际测试结果存在明显偏差——主要原因是轮胎摩擦系数、连杆弹性形变等现实因素难以在方程中完整建模。王同学设计了一套系统的实验方案,在不同坡度和载重条件下反复测试,用实验数据修正了理论模型中的系数,最终让控制参数在真实场景下达到了预期效果。
为手推车增加平衡机构,必然带来额外重量——而过重的车体会让使用者更加费力。王同学在结构设计阶段做了大量轻量化工作:选用铝合金型材代替钢管,优化连杆走向以减少冗余材料,并将执行机构嵌入推车框架内部。最终,整套平衡系统的增重控制在了可接受范围内,不影响日常使用体验。


— 王同学
“做这个项目之前,我从没想到一个推车也能用得上这么多数学知识。”